 |
| 0-limitswitch.jpg 635.79 KB Proximity limit switch on 20 ton actuator |
 |
| 422_Inclinometer.gif 25.32 KB Circuit inside the Inclinometer Box |
 |
| 422-az.gif 39.57 KB Circuit inside AZ box (Do not use 78L05 in cold temp) |
 |
| 422mod.gif 24.52 KB Remove RS232 chip and replace with RS-422 |
 |
| C_finished.jpg 1,998.28 KB |
 |
| const-azel.jpg 372.91 KB Under Construction |
 |
| controlpanel.jpg 1,289.37 KB |
 |
| Ctlpnl6.gif 50.99 KB |
 |
| F1EHN_box2.gif 41.33 KB |
 |
| F1EHN-box.gif 28.05 KB |
 |
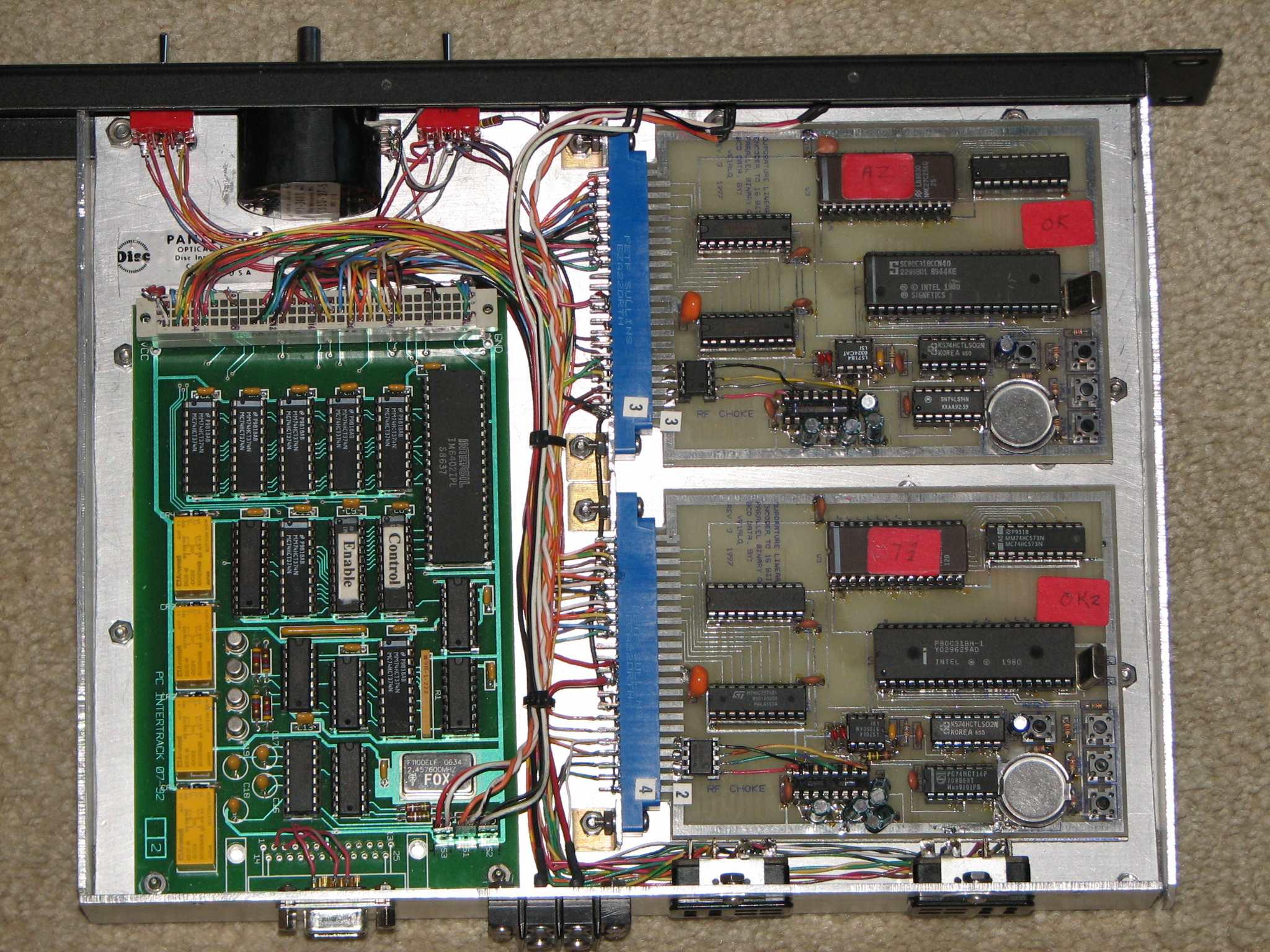
| F1EHN-VE1ALQ.jpg 104.55 KB |
 |
| incl.jpg 403.79 KB |
 |
| incl-ckt.jpg 390.63 KB |
 |
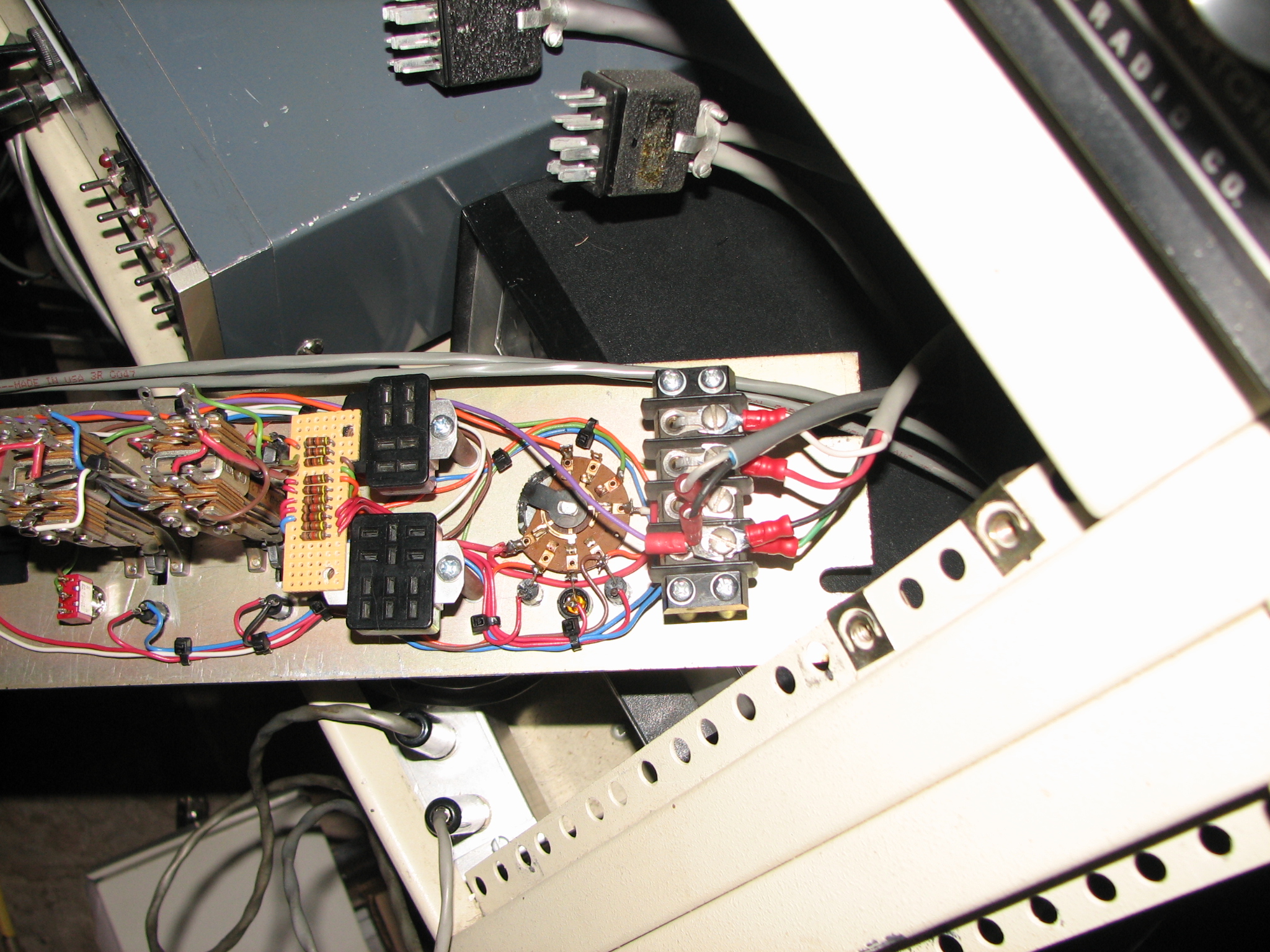
| Jbox9.gif 63.33 KB Antenna Junction Box Wiring |
 |
| Position-Coupling.gif 12.19 KB Mechanical drawing Homebrew coupler |
 |
| WireList3.gif 65.52 KB |