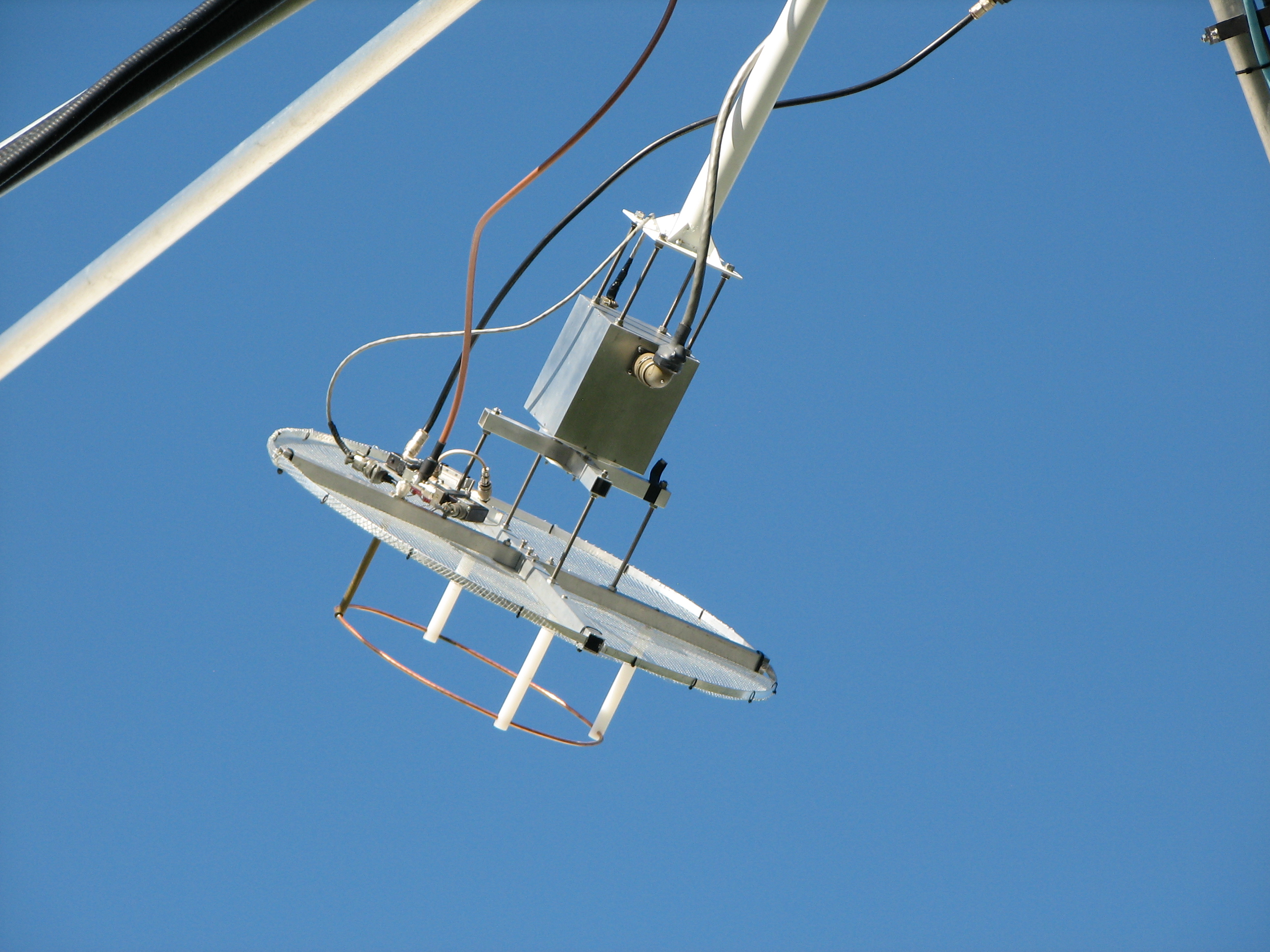
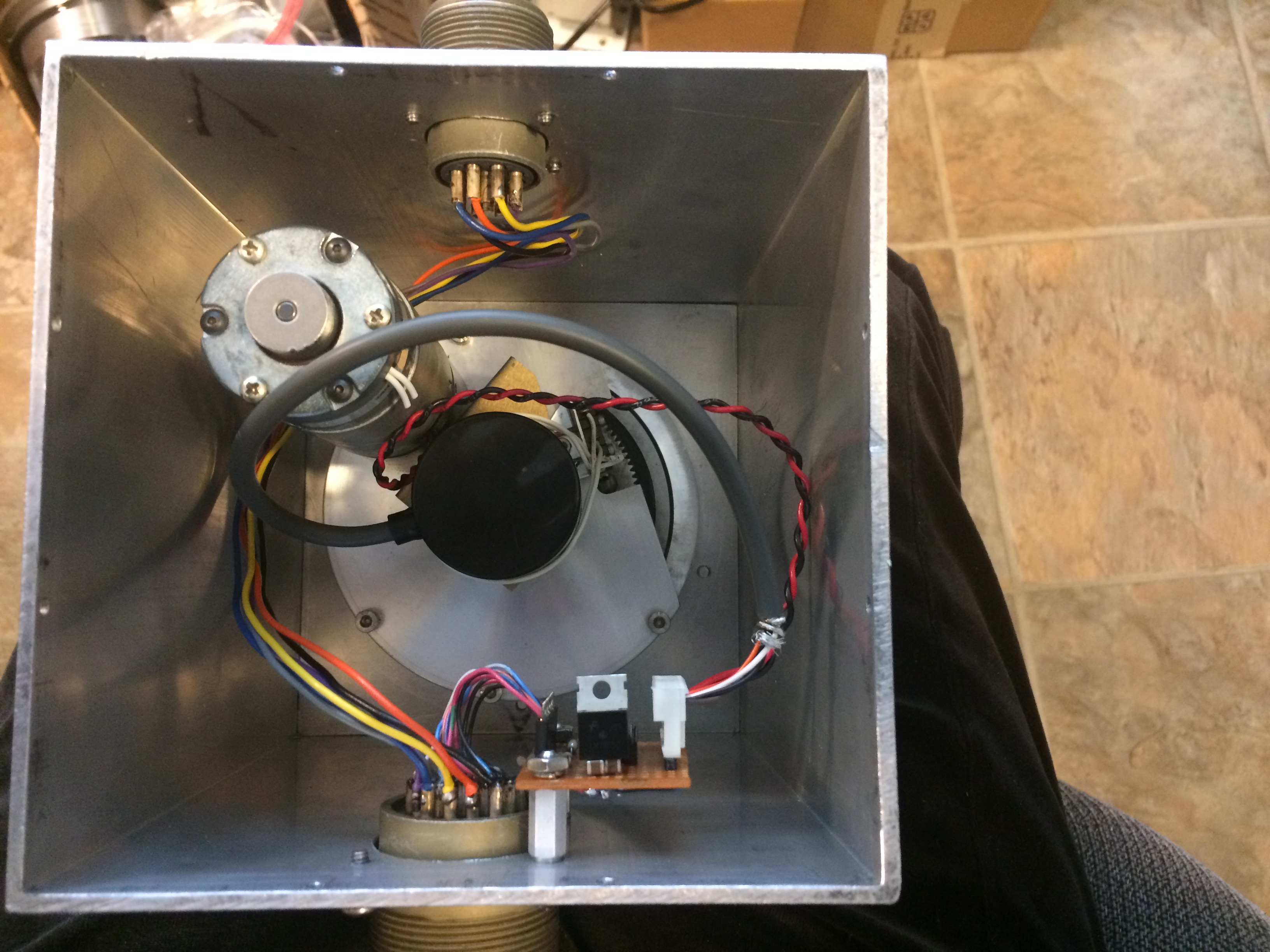
Polarity Rotator (shown with
222 MHz Feed)
Home| |
This page describes a
system for rotating a parabolic dish Feed in polarity to compensate
for geometric (spatial)
polarity difference and Faraday rotation between my location and
the other station
location.
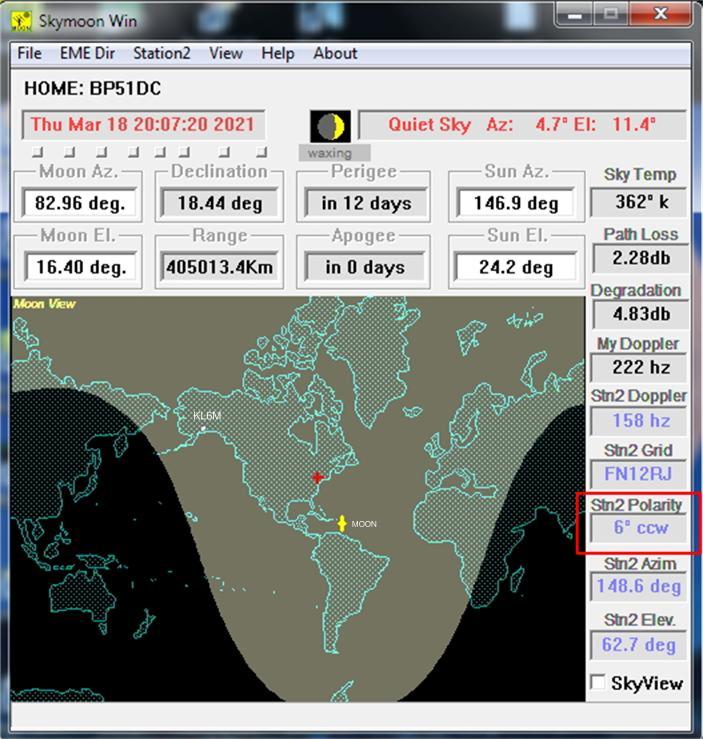
Step one is to determine
the geometric angle. This assumes both
stations are horizontally
polarized. Look at the first photo below,”
6deg.jpg.” The red plus is on New Jersey
and the polarity
difference is 6 degrees counter clockwise.
Rotate the feed to -6 and
press the "GEO"
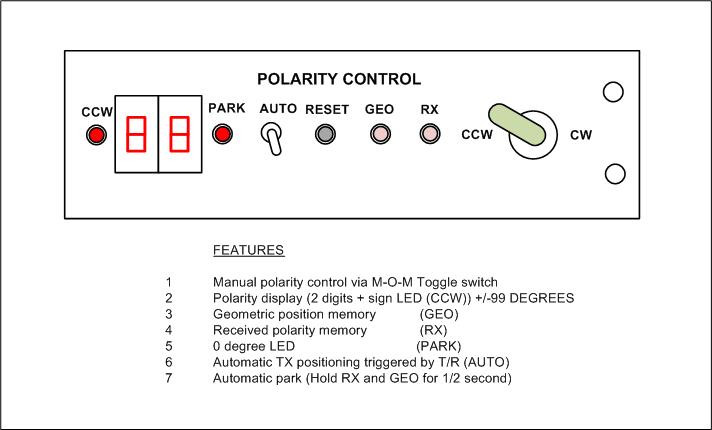
button on the control panel shown below in "IMG_3553.JPG"
Step two is Rotate the
feed in search of the best signal, shown at 25 degrees clockwise in
photo
"Pol-Rot-EQ4.gif" below, and then press the "RX" button on
the control panel.
The processor in the
control panel will now compute the best angle to transmit to a
station in the New Jersey
area, and if the "Auto" switch is selected, will automatically
rotate to that position
when the Transmitter is enabled. When
returning to Receive, the
rotor will automatically
return to the optimum RX position.
|
|
|
|
|
||||||||||
|
|
|
|
|
||||||||||
|
|
|
|
Additional
examples of polarity calculations are shown here: Polarity Examples
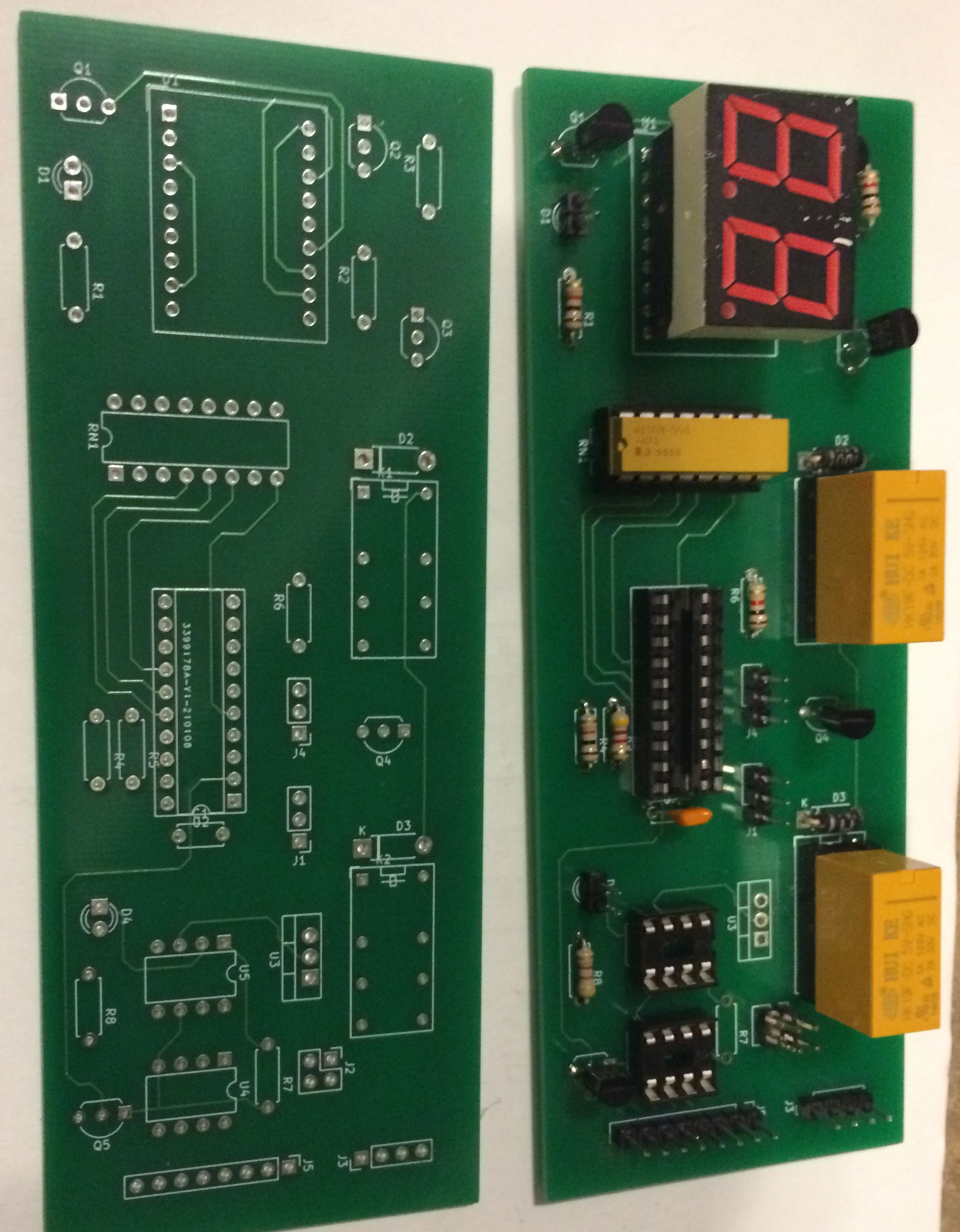
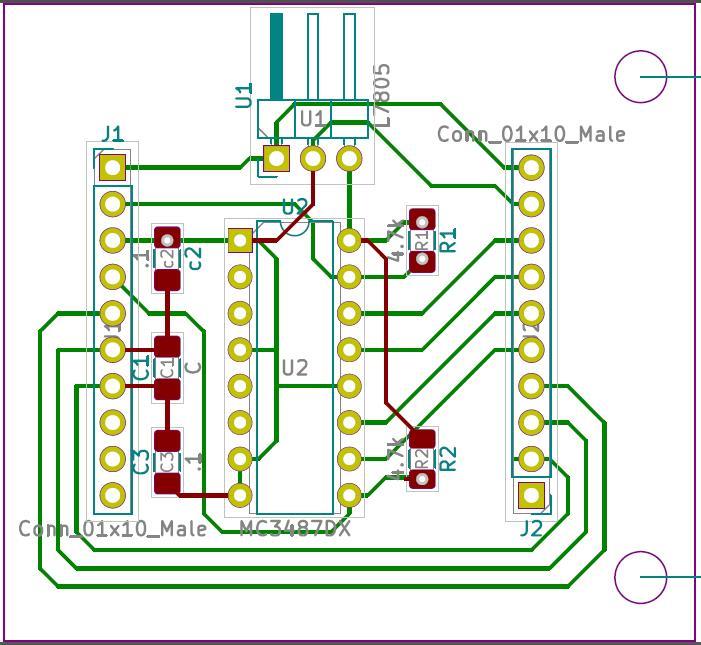
Block
diagram and Schematic http://alaska.net/~ptt/polarity/BLK-SCH.pdf
Overall
Flow Diagram http://alaska.net/~ptt/polarity/FLOW.pdf
Detailed
Flow Diagram of Proposed Solution for Auto TX Positioning Routine http://alaska.net/~ptt/polarity/tx-flow.pdf
Working
code for Auto TX Positioning Routine http://alaska.net/~ptt/polarity/polrotW.pdf
Central
States VHF Conference 2023
Paper: https://kl6m.com/polarity/PR.pdf
Briefing: https://kl6m.com/polarity/CSVHFS2023.pdf
For
questions or comments contact Mike at KL6M